5 Validation de la hauteur d'élévation
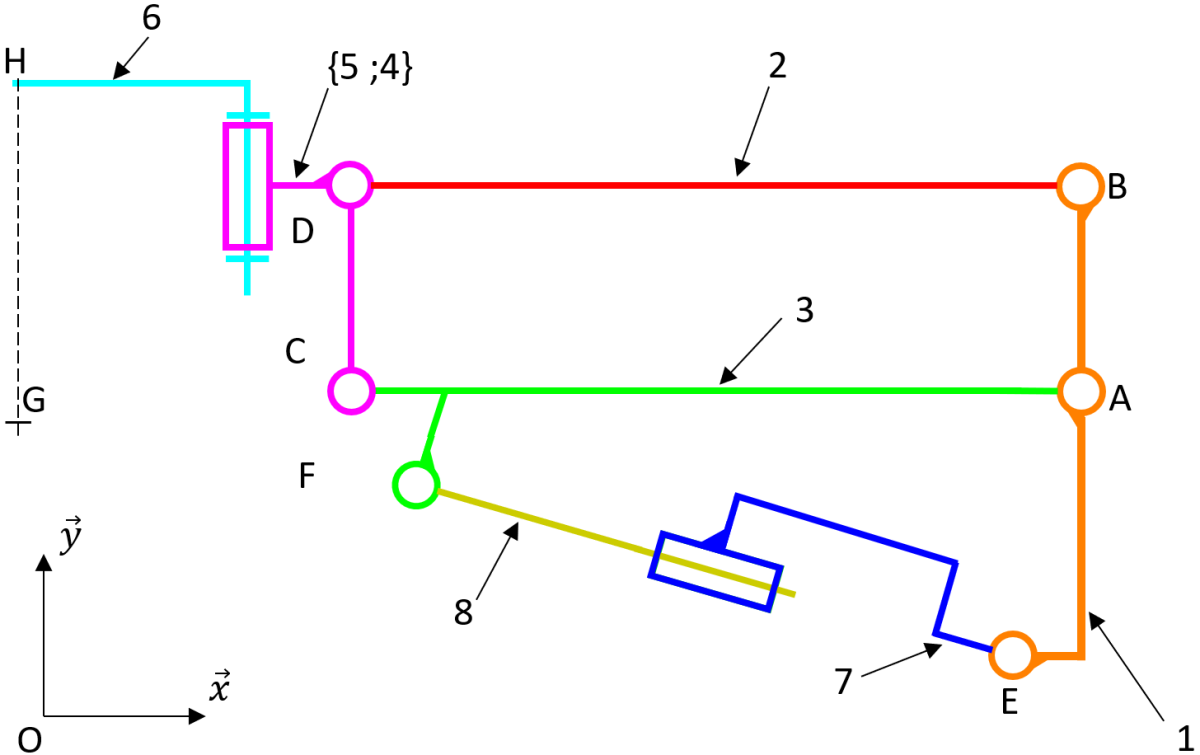
Dans ce schéma, le vérin électrique est modélisé par une liaison pivot glissant.
La tige du vérin (8) est complètement rentrée et les bras (2) et (3) sont horizontaux.
Le point F représente le centre de l'articulation entre la tige du vérin (8) et le bras inférieur (3).
La position de la personne est modélisée par le point G qui représente le centre de gravité de la personne à soulever. Ce point est situé sensiblement au niveau des hanches.
La personne est suspendue par un harnais accroché en H et le segment [HG] sera considéré vertical durant tout le mouvement.
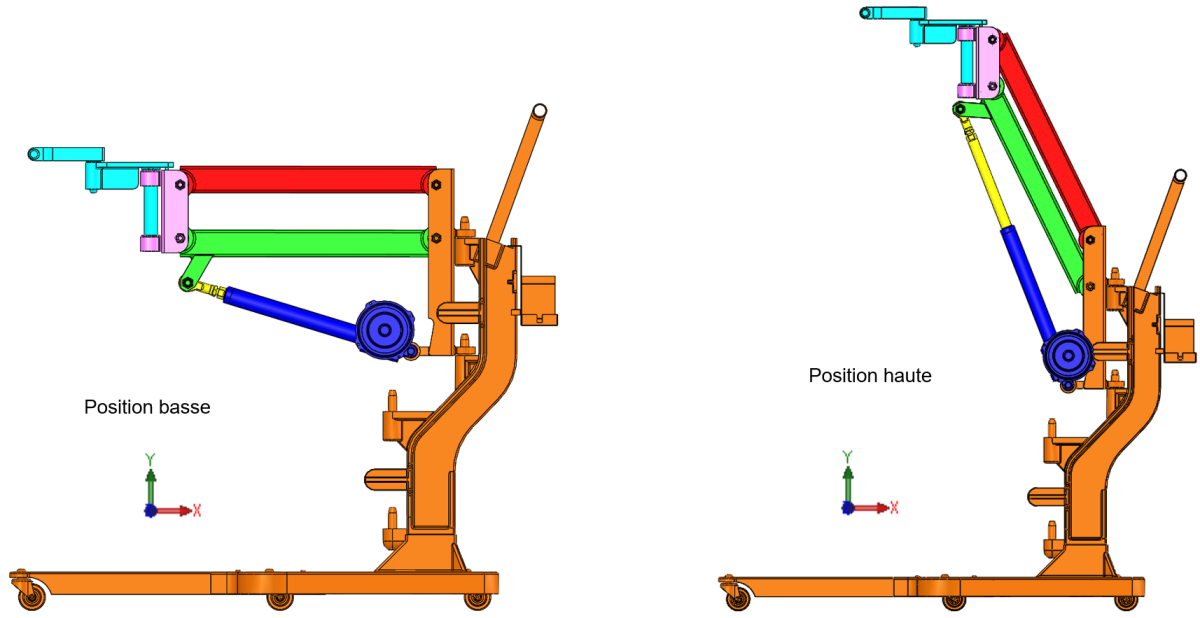
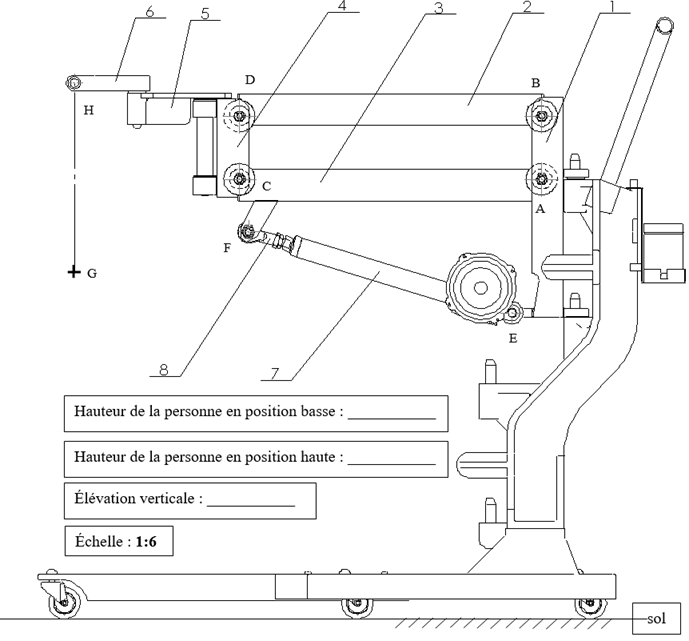
Afin de vérifier la validité de l'exigence 1.2 Lever verticalement la personne, on se propose de représenter le mécanisme en position haute et de déterminer la valeur de l'élévation verticale du point G dans cette position. Cette étude se fera graphiquement sur le document DR.
Analyse de la position basse
Q3. Pour le mécanisme en position basse, mesurer sur le document réponse fourni la hauteur de la personne par rapport au sol. Déterminer la valeur de cette hauteur à l'échelle 1:1 et inscrire le résultat sur le document réponse.
La valeur trouvée est-elle en conformité avec le CDCF ? (Justifier)
Recherche de la position haute
Q4 Caractériser et tracer la trajectoire Traj (C∈ 3 /1)
Q5 Caractériser et tracer la trajectoire Traj (F ∈ 3 /1)
Donnée : la course du vérin est c = 200 mm.
Q6 :Calculer la longueur FE du vérin sorti. En déduire Fh la position du point F en position haute.
Rappel : les solides sont considérés comme indéformables.
Q7 : donner la conséquence pour les longueurs entre les points du solide 3. En déduire Ch la position du point C en position haute.
Q8 : Caractériser et tracer la trajectoire Traj (D∈ 2 /1) . En déduire Dh la position du point D en position haute.
Q9 : En déduire Gh la position du point G en position haute. Conclure sur le respect du C.D.C.
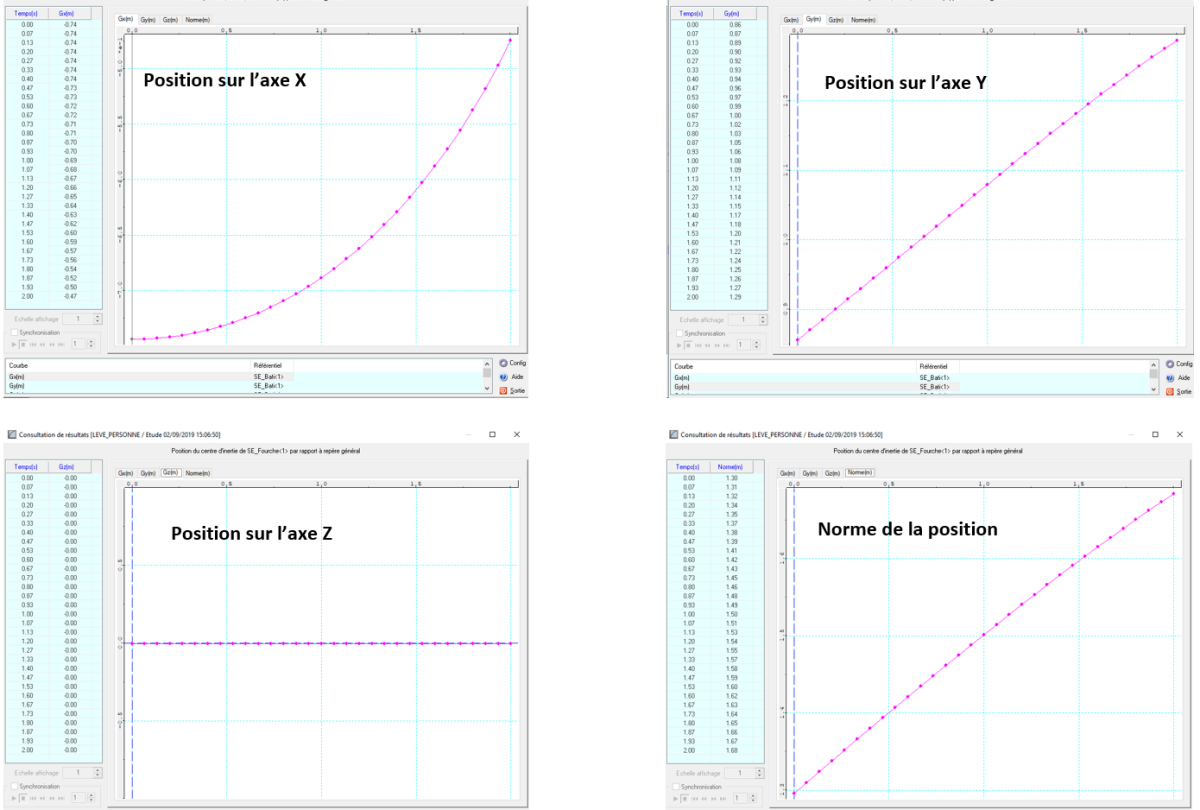
Utilisation des résultats issus de la simulation :
Les résultats de la simulation donnent les graphiques suivants quant à la position relative du point H, pour une course du vérin de 200 mm .
Q10 : choisir une courbe pour déterminer l'élévation du point H et justifier ce choix.
Q11 : utiliser la courbe pour vérifier votre travail.