Introduction à la commande en vitesse des moteurs DC
Définition : Commande en vitesse des moteurs DC
Certaines applications nécessitent de contrôler la vitesse d'un moteur, drone, voiture électrique ou cabine d'ascenseur sont des exemples dans lesquels il nécessaire de contrôler la vitesse de l'objet.
Pour rappel les caractéristiques en sortie d'un moteur électrique, couple et fréquence de rotation, dépendent des caractéristiques de l'alimentation électrique en entrée, tension, courant et fréquence.
La commande d'un moteur doit donc agir sur l'alimentation électrique en entrée, et chaque type de moteur, courant continu, pas à pas et brushless, ayant un fonctionnement propre, il faudra développer une commande spécifique.
Pour la suite nous explorerons donc les caractéristiques des commandes des moteurs à courant continu, pas à pas et brushless.
Attention : Et pour les servomoteurs ?
La commande des servomoteurs ne sera pas abordée. En effet elle est transparente car directement intégrée au système, seul un signal de commande est nécessaire. Cependant un servomoteur alimenté en DC étant soit composé d'un moteur à courant continu, pas à pas ou brushless il est possible de prédire le type de commande utilisée.
Commande en vitesse des moteurs à courant continue et motoréducteur
Complément : Caractéristiques d'un moteur à courant continue
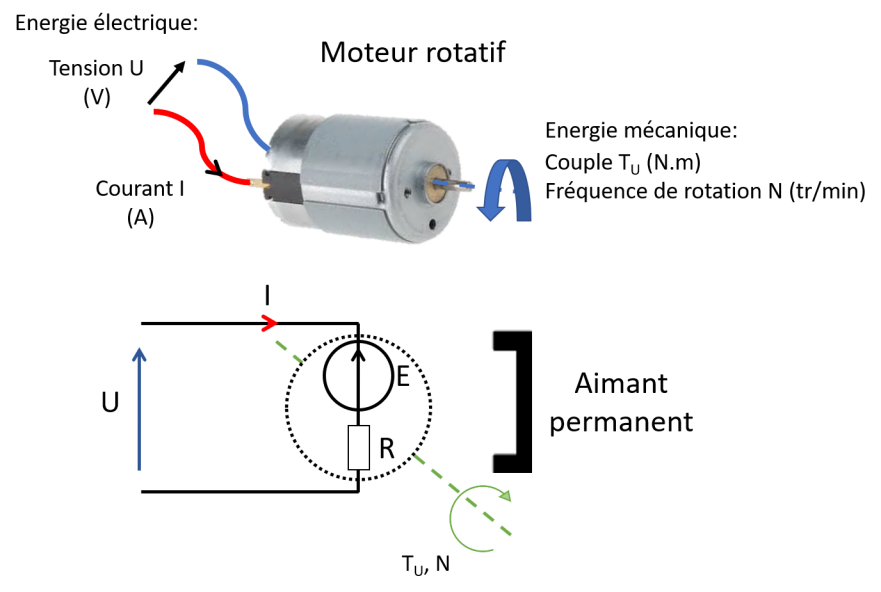
Voici ci contre le modèle électrique simplifié du moteur à courant continue.
On peut écrire grâce à lui que : \(U=E+R I\) avec U et I la tension et le courant d'alimentation, la résistance des bobines du moteur et E la force contre électromotrice (FCEM).
La FCEM est l'image de la conversion de l’énergie electrique en énergie mécanique, elle dépend du couple et de la vitesse de rotation.
Dans le cas où la charge sur l'arbre du moteur est constante, il est possible de faire varier la fréquence de rotation d'un moteur à courant continu en faisant varier la tension « U » d'alimentation :
En effet d'après l’équation suivante U=E+R×I si R est petit et en supposant la charge constante, le terme R×I ne varie pas
« E » sera proportionnel à U, donc la vitesse de rotation est proportionnelle à U.
Définition : Le hacheur - Commande en vitesse d'un moteur à courant continu
Le hacheur, est un dispositif électronique qui permet de modifier la valeur de la tension moyenne.
Pour cela le hacheur est composé de plusieurs interrupteurs commandés qui viennent littéralement hacher une tension fournie
par une source de tension continue (telle qu'une batterie) avec un rendement élevé.
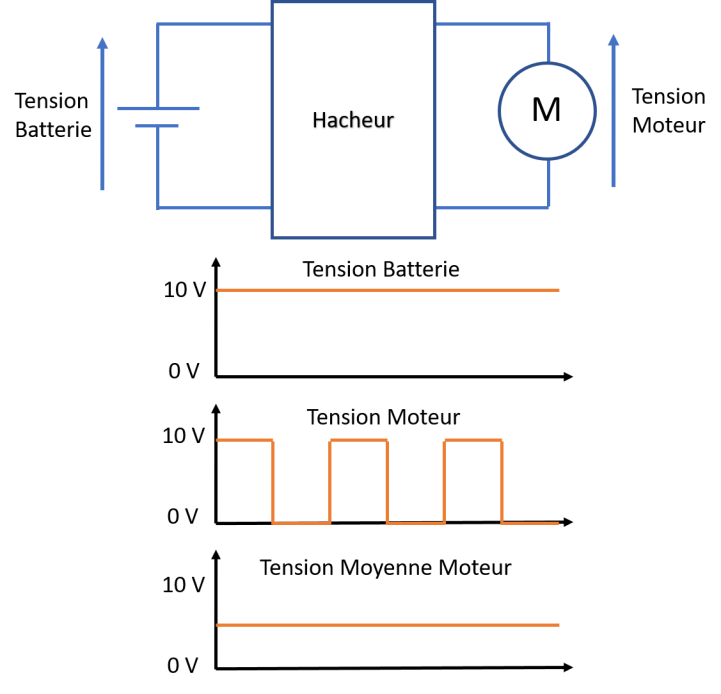
Comportement du moteur face à une tension variable
Face à une tension qui est saccadé, il serait imaginable que le moteur aurait aussi une réponse saccadé (il s'arrête, il repart, il s'arrête, il repart...). Or le moteur a une inertie mécanique et il ne s'arrête pas immédiatement. Cela n'est valable que si la fréquence d'alternance de la tension est suffisamment élevée.
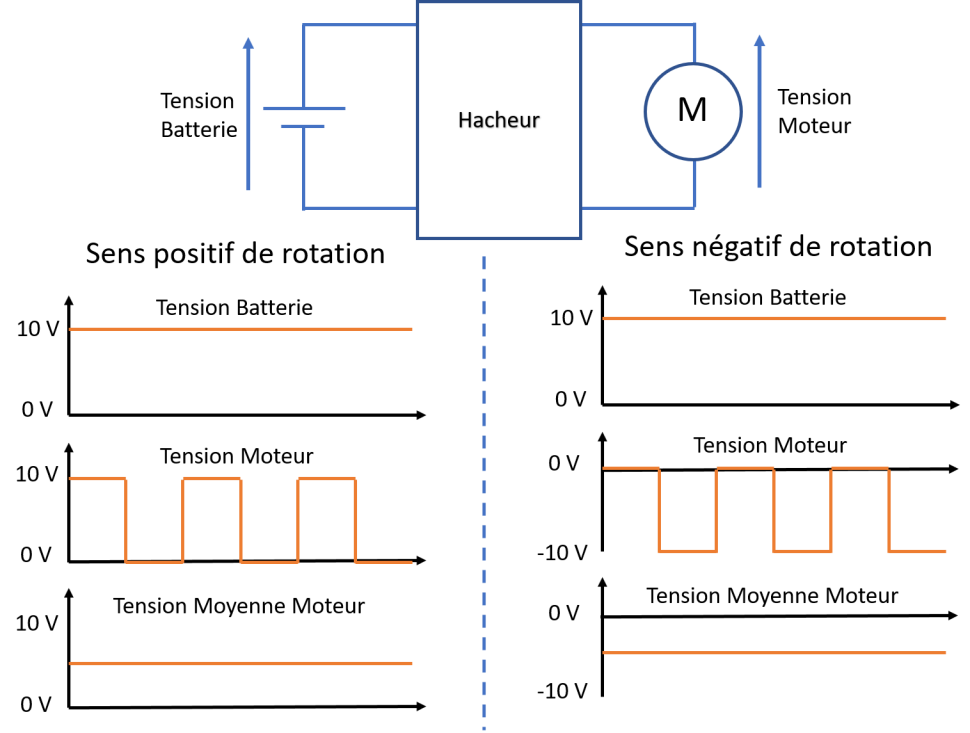
Complément : Hacheur 2 cadrants et hacheur 4 cadrants
Un hacheur 2 cadrants permet de piloter un moteur que dans un sens de rotation
Pour piloter le moteur dans les deux sens il est nécessaire d'utiliser un hacheur 4 cadrants.
Les caractéristiques d'un hacheur sont :
La tension d'alimentation moteur
Le courant maximum d'alimentation
Le courant en pic (au démarrage du moteur)
La tension de commande du hacheur
Dans les règles de l'art, la tension et le courant d'alimentation doivent s'adapter au moteur. On prendra donc des valeurs égale voir supérieur.
Commande en vitesse des moteurs brushless
Complément : Caractéristiques d'un moteur brushless
Dans un moteur à courant continue les balais jour naturellement le rôle de commutateur. Dans un moteur brushless les balais étant absent le modulateur de vitesse va devoir jouer ce rôle.
Le moteur brushless doit être alimenté en triphasé, soit trois signaux alternatifs déphasé de 120° les uns par rapport aux autres.
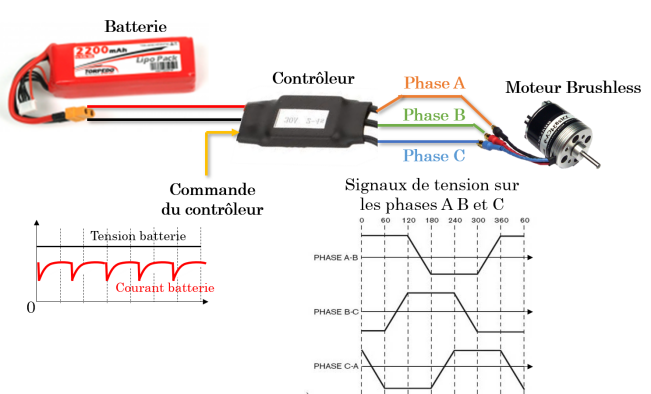
La vitesse du moteur brushless sera cette fois ci dépendante de la fréquence de ces trois signaux.
Le rôle du modulateur sera donc de fournir trois signaux exactement déphasé de 120° avec contrôle également précis de la fréquence de rotation.
Définition : Le contrôleur - Commande en vitesse d'un moteur brushless
Le contrôleur, est un dispositif électronique qui fourni trois signaux carrés alternatifs déphasés de 120° les uns par rapport aux autres.
La tension est fixe seul la fréquence est ici variable permettant ainsi de piloter la vitesse du moteur brushless.
Le fonctionnement du contrôleur est similaire à celle d'un hacheur 4 cadrants, il est composé de plusieurs interrupteurs commandés qui viennent littéralement hacher une tension fournie par une source de tension continue (telle qu'une batterie).
Une différence majeur avec les hacheurs utilisés pour les moteurs à courant continue, le contrôleur à besoin de connaître la position du rotor du moteur brushless à chaque instant pour le piloter, ce qui complexifie grandement le fonctionnement du contrôleur.
Complément : Comment choisir un contrôleur ?
Les caractéristiques d'un contrôleur sont :
Tension d'alimentation moteur ou tension admissible. De 1S à 4S, il faut multiplié le chiffre par 3,7.
Le courant d'alimentation moteur.
Le type de batterie admissible.
La tension Bec, correspond à la tension d'alimentation du contrôleur.
Commande en position des moteurs pas à pas
Complément : Caractéristiques d'un moteur pas à pas
Un moteur pas à pas permet de transformer une impulsion électrique en un mouvement angulaire.
Les moteurs possèdent un rotor à aimant permanent, donc un rotor qui possède des pôles NORD et SUD. À cause des aimants permanents, le rotor reste freiné à sa dernière position lorsque le bloc d'alimentation cesse de fournir des impulsions.
Une façon simple de voir le système, est de placer une boussole entre deux aimants. Suivant la bobine qui est alimentée et le sens du courant, l'aimant va s'aligner avec le champ.
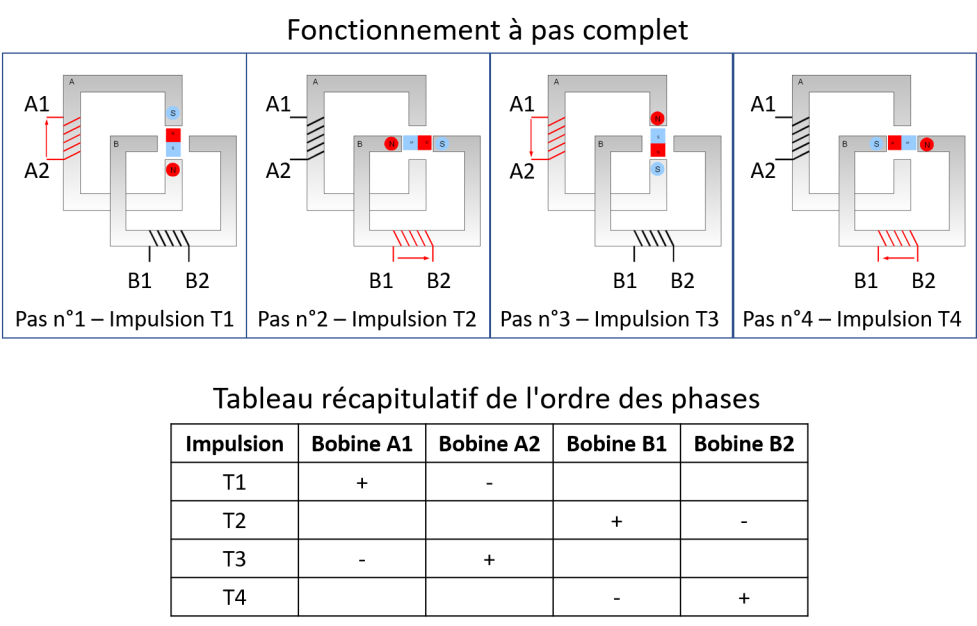
Plus il y a de paire de bobine, plus il y aura de pas possible.
Définition : Le driver - Commande en position d'un moteur pas à pas
Le driver, est un dispositif électronique qui fourni une tension au borne de chaque bobine du moteur pas à pas.
Pour un moteur pas à pas de type bipolaire on utilise des ponts en H, c'est le même principe que hacheur 4 cadrants.

Complément : Comment choisir un driver ?
Les caractéristiques d'un driver sont :
Typologie du moteur pas à pas utilisé : Unipolaire ou Bipolaire.
La tension d'alimentation du moteur.
La tension d'alimentation du driver (logique).
Le courant d'alimentation du moteur.
Vitesse de commutation entre les pas.