Comparatif de plusieurs technologies de moteur électrique DC
Définition : Moteur électrique
Un moteur électrique est un dispositif électromécanique permettant la conversion d'énergie électrique par exemple en travail ou énergie mécanique. Ce processus est réversible et peut servir à produire de l'électricité :
Les machines électriques produisant de l'énergie électrique à partir d'une énergie mécanique sont communément appelées des génératrices, dynamos ou alternateurs suivant la technologie utilisée.
Les machines électriques produisant une énergie mécanique à partir d'une énergie électrique sont communément appelées des moteurs.

Complément : Caractéristiques d'un moteur
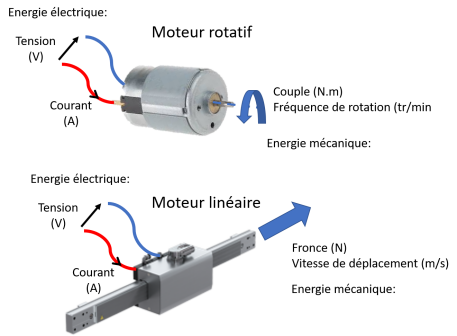
Les caractéristiques en entrée d'un moteur sont sa tension (V), son courant d'alimentation (A) et pour les moteurs AC, la fréquence d'alimentation, le nombre de phase (monophasé ou triphasé) et le couplage (triangle ou étoile).
Les caractéristiques en sortie sont :
pour le moteur rotatif le couple (N.m) et sa fréquence de rotation (tr/min).
pour le moteur linéaire la force (N) et la vitesse de déplacement linéaire (m/s).
On peut également trouver comme caractéristiques intéressantes le rendement et le poids.
Moteur alternatif AC ou continue DC
Il existe deux grandes familles de moteur qui se définissent essentiellement par le type d'alimentation nécessaire à leur fonctionnement :
Les moteurs AC pour Alternatif Curent ou Courant Alternatif
Les moteurs DC pour Direct Current ou Courant Direct ou Courant continue.
1. Les moteurs AC :
Ils présentent plusieurs avantages :
Ils sont simples de construction
Ils sont plus économiques du fait d'une consommation plus faible au démarrage
Ils sont également plus robustes et donc ont généralement une plus grande durée de vie.
Ils nécessitent peu d'entretien
Ils sont donc particulièrement adaptés aux applications nécessitant des mouvements continus et peu de changements de vitesses. Les pompes, les convoyeurs et les ventilateurs sont ainsi des terrains d'application parfaits pour ce type de moteur. Ils peuvent aussi être intégrés à des systèmes ne requérant pas une grande précision s'ils sont utilisés avec une vitesse variable.
En revanche, les fonctions de contrôle de vitesse les rendent plus coûteux que les autres moteurs.
Ils sont essentiellement alimentés en triphasés.
2. Les moteurs DC :
Ils présentent plusieurs avantages :
Ils sont précis et rapides
Leur vitesse peut être contrôlée en variant la tension d'alimentation
Ils sont facilement installables, y compris dans des systèmes mobiles (sur batteries)
Le couple de démarrage est élevé
Le démarrage, l'arrêt, les accélérations ou marches arrières s'effectuent rapidement
Ils conviennent très bien aux applications dynamiques exigeant une grande précision notamment au niveau de la vitesse, comme dans le cas des ascenseurs, ou au niveau de la position comme pour les robots ou les machines-outils.
Cependant, ils présentent certains inconvénients suivant leur construction par rapport aux moteurs AC :
Ils sont moins courants car moins adaptés à des applications requérant de fortes puissances
Ils sont composés de nombreuses pièces qui s'usent et sont coûteuses à remplacer
Moteur à courant continue
Premier moteur développé dans l'histoire (1870), simple d'utilisation et polyvalent, il a été utilisé dans de nombreuses applications.
Aujourd’hui il existe plusieurs technologies ce qui concurrence ce moteur, son utilisation se restreint à des applications ne nécessitant pas de fortes vitesses, des couples importants au démarrage et réduction des coût dans l'électronique permettant de le piloter.
Les avantages des moteurs à courant continu :
Adaptation simple de la vitesse, du couple et du sens de rotation.
Fort couple au démarrage.
Raccordement direct à la source d'énergie : batteries d'accumulateurs, piles, etc.

Les principaux défauts du moteur à courant continu :
Changement régulier mais prédictible de l'ensemble balais/collecteur rotatif qui s'use.
Limite de fonctionnement pour de très grande vitesse de rotation (>10 000 tr/min).
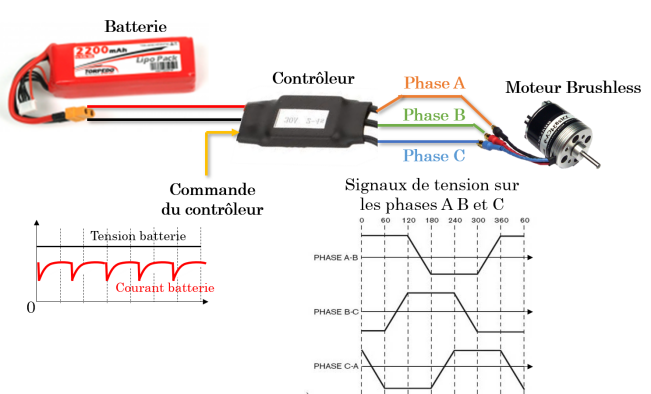
Moteur sans balais ou Moteur Brushless
Un moteur « brushless » est un moteur qui ne contient aucun balai. Il est donc possible d'atteindre de très grande vitesse de rotation (>10 000 tr/min).
D'un point de vu extérieur il fonctionne en courant continu mais un système électronique de commande doit assurer la commutation du courant pour permettre la rotation du moteur.
Les moteurs brushless équipent en particulier les disques durs et sont également très utilisés en modélisme pour faire se mouvoir des modèles réduits d'avions, de drone et de voitures ainsi que dans l'industrie, en particulier dans les servo-mécanismes des machines-outils et en robotique.
Les avantages du moteur brushless :
Robuste.
Très grande vitesse de rotation.
Léger.
Les principaux défauts du moteur brushless :
capteur et électronique de commande nécessaire au fonctionnement.
Faible couple de démarrage
Motoréducteur
Un motoréducteur, n'est ni plus ni moins qu'un moteur à courant continue associé à un train d'engrenage.
La fonction du réducteur est de réduire la fréquence de rotation (0.01 tr/min à 1000 tr/min) et d'augmenter le couple.

Les avantages du motoréducteur :
Fort couple.
Faible fréquence de rotation (c'est un avantage car c'est la fonction attendue).
Même qualité qu'un moteur à courant continue.
Les principaux défauts du motoréducteur :
Même défauts que le moteur à courant continu.
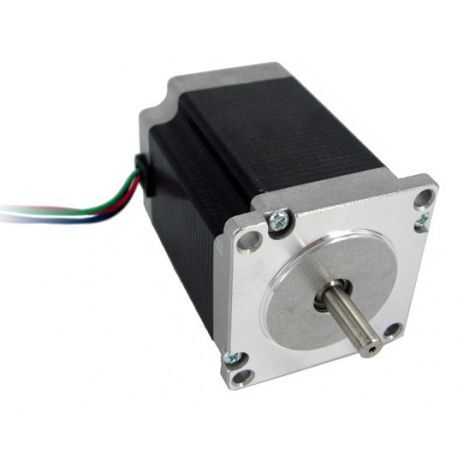
Moteur pas à pas
Les moteurs pas à pas sont très utilisés dans toutes les applications mécaniques ou l'on doit contrôler simplement la position ou la vitesse d'un système en boucle ouverte (Pas de mesure directe de la position de l'arbre).
Ces moteurs sont par exemple utilisés dans les imprimantes jet d'encre ou laser, pour positionner les têtes d'impression ou pour l'avancée du papier.
La commande des moteurs pas à pas est relativement simple car on n'a pas besoin d'accessoires tels que des codeurs pour connaître la position, chaque impulsion du système de commande les fait avancer d'un pas.
Les avantages du moteur pas à pas :
Fort couple.
Positionnement précis de l'arbre.
Commande simple.
Les principaux défauts du motoréducteur :
Faible fréquence de rotation.
Forte consommation en énergie (Courant nécessaire bloquer l'arbre dans sa position).
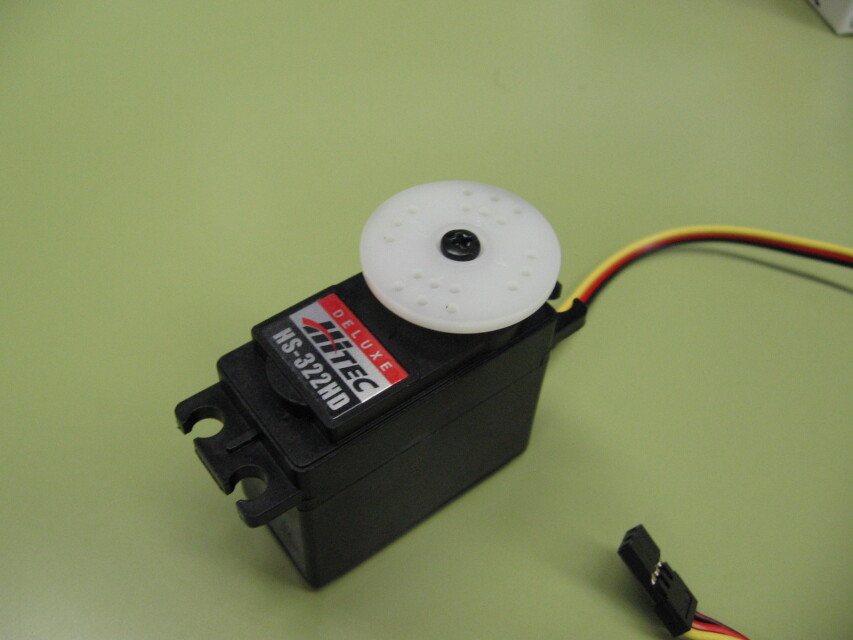
Servomoteur
Un servomoteur (souvent abrégé en « servo ») est un moteur capable de maintenir sa position même quant un effort est appliqué sur l'arbre moteur et dont la position est vérifiée en continu et corrigée en fonction de la mesure. C'est donc un système asservi.
Le servomoteur intègre dans un même boîtier, la mécanique (moteur et engrenage), et l'électronique, pour la commande et l'asservissement du moteur. La position est définie avec une limite de débattement d'angle de 180 degrés, mais également disponible en rotation continue.
Les servomoteurs sont répandus pour les vannes industrielles et le modélisme.
On utilise des moteurs électriques (continu, asynchrone, brushless) aussi bien que des moteurs hydrauliques. Le démarrage et la conservation de la position prédéterminée sont commandés par un système de réglage.
Les avantages du servomoteur :
Intégration simple au système.
Positionnement précis de l'arbre.
Les principaux défauts du motoréducteur :
Nécessite un contrôle électronique
Attention, des avantages et inconvénients dépendent également du moteur utilisé.
Motoréducteur : Fort couple, faible consommation d'énergie pour maintenir l'arbre en position, faible vitesse de rotation.
Moteurbrushless avec réducteur: Couple moyen, grande vitesse de rotation.