4 Simuler
Première simulation avec le programme de l'Arduino
Vous allez écrire le code nécessaire à la commande de la LED en fonction de l'état du bouton poussoir :
Si le bouton poussoir connecté en IO4 (4 pour le programme Arduino) est relâché la Led connectée en IO3 (3) est éteinte
Si le bouton poussoir est actionné la Led est allumée
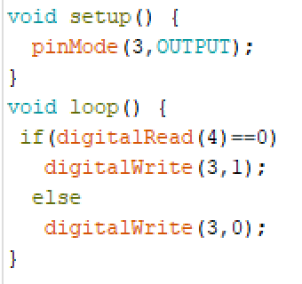
Cliquer sur "Code source"
Recopier le code ci-dessus
Cliquer sur "Saisie de schéma"
Lancer la simulation (flèhe Δ en bas à gauche)
Tester le fonctionnement de votre programme en cliquant sur le bouton poussoir.
Impossible d'accéder à la ressource audio ou vidéo à l'adresse :
La ressource n'est plus disponible ou vous n'êtes pas autorisé à y accéder. Veuillez vérifier votre accès puis recharger le média.
Simulation du servomoteur avec le programme de l'Arduino
Vous allez tester le code donné [doc] pour piloter le servomoteur :
la fenêtre du terminal permet d'envoyer une consigne de position au servomoteur (entre 0 et 180°)
Vous utiliserez l'oscilloscope pour visualiser le signal de commande du servomoteur (IO9)
Servo myservo;
String incomingByte ;
int potpin = 0;
int val;
int pos = 0;
void setup() {
pinMode(3,OUTPUT);
myservo.attach(9);
myservo.write(0);
Serial.begin(9600);
for(pos = 0; pos < 255; pos += 1) {
myservo.write(pos);
delay(15);
}
for(pos = 255; pos>=1; pos-=1) {
myservo.write(pos);
delay(15);
}
}
void loop() {
Serial.println("Indiquer un angle entre 0 et 180 degres : ");
incomingByte = Serial.readString() ;
while (Serial.available()==0) {
if(digitalRead(4)==0)
digitalWrite(3,1);
elsedigitalWrite(3,0);
}
Serial.print("I received: ");
val = Serial.parseInt();
Serial.println(val);
myservo.write(val);
delay(200);
Serial.flush();
}
Cliquer sur "Code source"
copier /coller le code donné
Cliquer sur "Editeur de schéma"
Lancer la simulation
Tester le fonctionnement: bouton poussoir, led, potentiomètre. Regarder l'évolution des signaux sur l'oscilloscope.
Régler l'oscilloscope de manière à visualiser le signal de commande du servomoteur, mesurer la durée du signal à l'état haut.
A faire pour les 3 valeurs suivantes :
0°
90°
180°
Comparer ces valeurs aux valeurs théoriques.
Impossible d'accéder à la ressource audio ou vidéo à l'adresse :
La ressource n'est plus disponible ou vous n'êtes pas autorisé à y accéder. Veuillez vérifier votre accès puis recharger le média.